'' Sometime you do not have a shoulder to cray but you always have a forehead to put down in sajda and cry because ALLAH is the best listener''
Sunday, 14 December 2014
Friday, 12 December 2014
TO WRITE CNC PART PROGRAM USING G00 AND G01 CODES.
G Codes:
G-Code or preparatory code or function, are functions in the Numerical control programming language. The G-codes are the codes that position the tool and do the actual work, as opposed to M-codes, that manages the machine.
T for tool-related codes
S and F are tool-Speed and tool-Feed,
D-codes for tool compensation
M codes:
M codes control the overall machine, causing it to stop, start, and turn on coolant, etc. whereas other codes pertain to the path traversed by cutting tools. Different machine tools may use the same code to perform different functions; even machines that use the same CNC control.
Partial list of M-Codes:
M00=Program Stop (non-optional)
M01=Optional Stop, machine will only stop if operator selects this option
M02=End of Program
M03=Spindle on (CW rotation)
M04=Spindle on (CCW rotation)
M05=Spindle Stop
M06=Tool Change
M07=Coolant on (flood)
M08=Coolant on (mist)
M09=Coolant off
M10=Pallet clamp on
M11=Pallet clamp off
M19=Spindle orientation
M30=End of program/rewind tape (may still be required for older CNC machines)
G00 Code:
G00 code is a rapid tool move that is used when moving tool in a linear motion from position to position without cutting any material.
G01 code:
The G01 code is a straight line feed move in a combination of X, Y or Z axis. It’s used specifically for the linear removal of material from a work piece.
PROGRAM:
The following example is done by using G00 and G01 codes
Program:
N01 G90 G20
N02 M06 T05 M03 S1200
N03 G00 X0 Y0 Z2
N04 G00 X10 Y10
N05 G01 Z-2.5 F200
N06 G01 X30 Y10
N07 G01 X30 Y30
N08 G01 X25 Y30
N09 G01 X25 Y15
N10 G01 X15 Y15
N11 G01 X15 Y30
N12 G01 X10 Y30
N13 G01 X10 Y10
N14 G00 Z2
N15 G00X0 Y0
N16 M05 M30
Thursday, 11 December 2014
REAL TIME POWER MONITORING SYSTEM IN INDUSTRIAL MANAGEMENT (Hardware based) mini project
MAIN FIELD OF PROJECT:
The aim of this project is to design a practically realizable power monitoring system to observe variations in line voltage and line current and can also control the power factor. This project also display and record the measured values on computer.
PROJECT OBJECTIVE:
The objectives of our project are :
Development of a Data-Acquisition Device* for measuring three phase physical parameters of AC Mains Voltage, AC Mains Current, Phase Difference, Power Factor, Real-Power, Reactive-Power, Apparent Power, Temperature, Battery Voltage (collectively regarded as data ). It displays the corresponding values on an LCD display after measurement is done.
PROJECT METHODOLOGY:
In hypothesis report project demonstration at every aspect will be help full for every user either professional or new. The basic tasks that will be performed in designing and presenting the project physically (circuitry) and in the soft form this will go through implementing signal conditioning circuitry, analog-to-digital converter (ADC), and computer bus and then presenting of final model with reports.
SIMULATION TOOL:
Following Software and Simulation tools were used to aid my project and it’s Report, these simulation and software tools are used to design and develop project design and presentation.
There are basically two codes written for the two different fronts of this project,
Code for hardware instrument.
Code for instrument interface with computer.
The code for instrument hardware is written in MikroC Pro for PIC 2011. The micro controller used is Microchip™ PIC18F452©.
The code for instrument interface with computer is developed, works on serial communication, and the application software is developed on NI LabVIEW 2011.
PROTEUS (Circuit designed).
Microsoft Office.
HARDWARE SPECIFICATIONS:
Details of hardware components used in the project are given below,
Industrial Power Plant Model
Data Acquisition (DAQ) Device/Instrument
Circuit Power Supply
Potential Transformer
Current Transformer
Schmitt Triggers/Sine to Square wave converters
Active/ Precision Rectifiers or Super Diodes
Micro controller Circuit
Serial Communication Circuit.
BLOCK DIAGRAM OF PROJECT:
Project Block Diagram (left) block representation of a power plant with 4-loads (right) overall block representation of DAQ card hardware.

Wednesday, 10 December 2014
Nameless folder
To create a folder on your desktop , which is nameless, having no name follow these steps,
- Right click on your mouse.
- Go to the new folder and click it.
- Now before naming the new folder you created press ALT button on your keyboard and type 255 and press enter .
Tuesday, 9 December 2014
Hysteresis In Control System
Hysteresis:-
Hysteresis is the dependence of the output of a system not only on its current input, but also on its history of past inputs. The dependence arises because the history affects the value of an internal state
Hysteresis in thermostat:-
Hysteresis can be used to filter signals so that the output reacts more slowly than it otherwise would, by taking recent history into account. For example, a thermostat controlling a heater may turn the heater on when the temperature drops below A degrees, but not turn it off until the temperature rises above B degrees (e.g., if one wishes to maintain a temperature of 20 °C, then one might set the thermostat to turn the furnace on when the temperature drops below 18 °C, and turn it off when the temperature exceeds 22 °C). This thermostat has hysteresis. Thus the on/off output of the thermostat to the heater when the temperature is between A and B depends on the history of the temperature. This prevents rapid switching on and off as the temperature drifts around the set point.
Hysteresis In Valves:-
Hysteresis is a dynamic response to change that causes the path of movement to be different when the response is increasing than when the response is decreasing. This is found commonly in control valves after some time period as the seal around the stem is tightened to decrease fugitive emissions. The tight packing resists valve movement in any direction making its position change less than demanded by the valve positioning mechanism. Eventually additional force is required to overcome the packing resistance and the valve moves closer to the desired position.
Control loops depending upon control valves (most) see hysteresis as a dead time in their dynamic response and compensate by applying additional reset (integral) action. When the hysteresis becomes too large, the control loop may become unstable and oscillate about the set point more than desired. The "cure" is to rebuild the control valve - a costly maintenance operation. Control loops may use other final control elements such as variable speed drives to avoid hysteresis from control valves, but this is not often used
In process control, the most serious form of hysteresis is encountered in pneumatic control valves. The control valve is the weakest link in the control system because it is the only moving part and due to the presence of friction it is subjected to varying dynamics quite often. The major causes of control valve problems are non linearities such as hysteresis, stiction, backlash, and dead band. Due to these, the pneumatic control valve’s stem movement does not follow the control signal accurately but deviates from it. In other words, the relationship between controller output and controlled variable often changes. All valves have some hysteresis, but excessive valve hysteresis typically occurs when the valve sticks as it tries to open and close. This can happen for a number of reasons including overtightened packing. Therefore, hysteresis is the one of the biggest problems associated with the final control element. This can be roughly defined as the maximum difference obtained in stem positions for the same input up-scale and down-scale.
In process industries, pneumatic control valves are the most commonly used actuators or final control elements. But in practice it is very difficult to do the modelling of any plant or process having a final control element with hysteresis.
Hysteresis is a nonlinear phenomenon and cannot be expressed by a transfer function. Therefore simulation of such a plant or process is not an easy job. So far very little work has been reported in the literature regarding the effective modelling of a plant or process having hysteresis elements.
Rock Engineering Design
Rock Engineering Design:Rock engineering design consists of;
Engineering constraints
Objective
Input Data
Design methods
Output specification
Feedback
Engineering Constraints: Constraints means something that limits your freedom to do what you do. Rock engineer usually related to the rocks suppose purpose of excavation, shape of the excavation (Circular shape, horse shoe shape etc.) etc. Basically there are several factor which control the engineer these factors are;
Function
Size
Shape
Layout
Method of excavation
Objective: Objective means a thing aimed at or sought; a goal. Rock engineer have basically three objective which is under;
Safety
Stability
Economy
The rock engineer suppose who design the excavation is also know about that the design excavation should be safe, stable and economical.
Input Data: Input data is also called data acquisition. Input data is one of the necessary factor of rock engineering design. Input data consists of;
Geological structure
Rock and rock strata properties
Groundwater
In situ stress field
Applied loads
Geological data consist of engineering geological mapping and geo technical core logging. Geological data tells us about the geology of strata. Rock and rock strata properties tells us about the strength, deform ability and factors of influence of the rock strata. One of the critical thing during design the excavation is the condition of ground water. Because due to the presence of ground water the rock strength decrease.
Design Methods: We only apply three type of design methods which as;
Analytical Method
Empirical Method
Observational Method
The most predominant design approach is the empirical design method.
Analytical methods:
Utilise the analysis of stresses and deformations around openings.
E.g. closed form solutions, numerical methods (finite elements, finite differences), analog simulations (photo-elastic).
Observational design methods:
Rely on actual monitoring of ground movement during excavations to detect measurable instability and on the analysis of ground-support interaction.
The observational method is a way to check other methods.
Empirical design methods:
These methods asses the stability of mines and tunnels by the use of statistical analysis of underground observations.
For example engineering rock mass classifications.
Output Specification: Output specification tells us about the mines and tunnels. Especially there roof spans, stand-up time and support guidelines. Also tells us about slope and foundations. Especially rock mass cohesion and friction and deformation modulus.
Feedback: Feedback is actually the result of the design. Feedback is actually tells us about the selection of instrumentation for performance monitoring remedial measure in case of instability.http://mobilezonex.blogspot.com.tr/2014/12/methods-of-design-in-rock-engineering.html
Methods of design in rock engineering:
There are three main design approaches for excavation in rock
Analytical Method
Observational Method
Empirical Method
The most predominant design approach is the empirical design method.
Analytical methods:
Utilizes the analysis of stresses and deformations around openings.
E.g. closed form solutions, numerical methods (finite elements, finite differences), analog simulations (photo-elastic).
Observational design methods:
Rely on actual monitoring of ground movement during excavations to detect measurable instability and on the analysis of ground-support interaction.
The observational method is a way to check other methods.
Empirical design methods:
These methods asses the stability of mines and tunnels by the use of statistical analysis of underground observations.
For example engineering rock mass classifications.
Rock mass classification:
Rock mass classification schemes are Empirical approaches to Excavations design, in particular for determining support requirements. So it is a "trial-and-error" procedure
Rock mass classification schemes have been developing for over 100 years since Ritter (1879) attempted to formalize an empirical approach to tunnel design, in particular for determining support requirements.
Objectives:
Identify the most significant parameters influencing the behaviour of a rock mass
Divide a particular rock mass formulation into groups of similar behaviour – rock mass classes of varying quality
Provide a basis of understanding the characteristics of each rock mass class
Relate the experience of rock conditions at one site to the conditions and experience encountered at others
Derive quantitative data and guidelines for engineering design
Benefits of rock mass classifications:
Improving the quality of site investigations by calling for the minimum input data as classification parameters
Providing quantitative information for design purposes
Enabling better engineering judgement and more effective communication on a project
List of rock mass classifications:
Different classification systems place different emphases on the various parameters, and it is recommended that at least two methods be used at any site during the early stages of a project.
Rock Quality Designation index (RQD)
Rock Structure Rating (RSR)
Geo mechanics Classification or the Rock Mass Rating (RMR) system
Tunnelling Quality Index (Q system)
Terzaghi's rock mass classification
Rock Structure Rating (RSR):
Wickham et al (1972) described a quantitative method for describing the quality of a rock mass and for selecting appropriate support on the basis of their Rock Structure Rating (RSR) classification.
The significance of the RSR system, is that it introduced the concept of rating each of the components listed below to arrive at a numerical value of RSR = A + B + C.
A) Parameter A, Geology: General appraisal of geological structure on the basis of:
a. Rock type origin (igneous, metamorphic and sedimentary).
b. Rock hardness (hard, medium, soft and decomposed).
c. Geologic structure (massive, slightly faulted/folded, moderately faulted/folded, intensely faulted/folded).

B) Parameter B, Geometry: Effect of discontinuity pattern with respect to the direction of the tunnel drive on the basis of:
a. Joint spacing.
b. Joint orientation (strike and dip).
c. Direction of tunnel drive.

C)Parameter C: Effect of groundwater inflow and joint condition on the basis of:
a. Overall rock mass quality on the basis of A and B combined.
b. Joint condition (good, fair, poor).
c. Amount of water inflow (in gallons per minute per 1000 feet of tunnel).


Figure 4: RSR support estimates for a 24 ft. (7.3 m) diameter circular tunnel. Note that rock bolts and shotcrete are generally used together. (After Wickham et al 1972).
Geo mechanics Classification:
Bieniawski (1976) published the details of a rock mass classification called the Geo mechanics Classification or the Rock Mass Rating (RMR) system. This system is used in wide engineering practise involving tunnels, chambers, mines, slopes, and foundations.The Geo mechanics Classification has found wide applications in various types of engineering projects such as;
Tunnels
Slopes
Foundations
Mines
The following six parameters are used to classify a rock mass using the RMR system:
1. Uni axial compressive strength of rock material.
2. Rock Quality Designation (RQD).
3. Spacing of discontinuities.
4. Condition of discontinuities.
5. Groundwater conditions.
6. Orientation of discontinuities.
In applying this classification system, the rock mass is divided into a number of structural regions and each region is classified separately. The boundaries of the structural regions usually coincide with a major structural feature such as a fault or with a change in rock type. In some cases, significant changes in discontinuity spacing or characteristics, within the same rock type, may necessitate the division of the rock mass into a number of small structural regions.
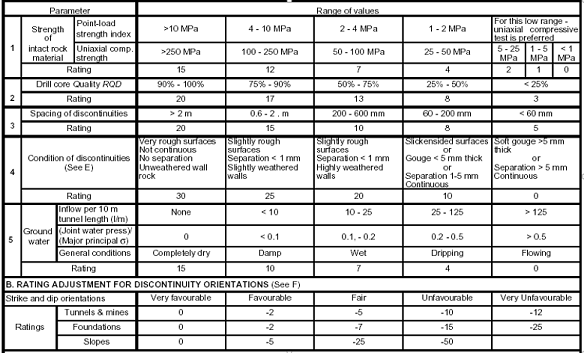
CLASSIFICATION PARAMETERS AND THEIR RATINGS
ROCK MASS CLASSES DETERMINED FROM TOTAL RATINGS:

Guidelines for excavation and support of 10 m span rock tunnels in accordance
with the RMR system (After Bieniawski 1989):

Analytical Method
Observational Method
Empirical Method
The most predominant design approach is the empirical design method.
Analytical methods:
Utilizes the analysis of stresses and deformations around openings.
E.g. closed form solutions, numerical methods (finite elements, finite differences), analog simulations (photo-elastic).
Observational design methods:
Rely on actual monitoring of ground movement during excavations to detect measurable instability and on the analysis of ground-support interaction.
The observational method is a way to check other methods.
Empirical design methods:
These methods asses the stability of mines and tunnels by the use of statistical analysis of underground observations.
For example engineering rock mass classifications.
Rock mass classification:
Rock mass classification schemes are Empirical approaches to Excavations design, in particular for determining support requirements. So it is a "trial-and-error" procedure
Rock mass classification schemes have been developing for over 100 years since Ritter (1879) attempted to formalize an empirical approach to tunnel design, in particular for determining support requirements.
Objectives:
Identify the most significant parameters influencing the behaviour of a rock mass
Divide a particular rock mass formulation into groups of similar behaviour – rock mass classes of varying quality
Provide a basis of understanding the characteristics of each rock mass class
Relate the experience of rock conditions at one site to the conditions and experience encountered at others
Derive quantitative data and guidelines for engineering design
Benefits of rock mass classifications:
Improving the quality of site investigations by calling for the minimum input data as classification parameters
Providing quantitative information for design purposes
Enabling better engineering judgement and more effective communication on a project
List of rock mass classifications:
Different classification systems place different emphases on the various parameters, and it is recommended that at least two methods be used at any site during the early stages of a project.
Rock Quality Designation index (RQD)
Rock Structure Rating (RSR)
Geo mechanics Classification or the Rock Mass Rating (RMR) system
Tunnelling Quality Index (Q system)
Terzaghi's rock mass classification
Rock Structure Rating (RSR):
Wickham et al (1972) described a quantitative method for describing the quality of a rock mass and for selecting appropriate support on the basis of their Rock Structure Rating (RSR) classification.
The significance of the RSR system, is that it introduced the concept of rating each of the components listed below to arrive at a numerical value of RSR = A + B + C.
A) Parameter A, Geology: General appraisal of geological structure on the basis of:
a. Rock type origin (igneous, metamorphic and sedimentary).
b. Rock hardness (hard, medium, soft and decomposed).
c. Geologic structure (massive, slightly faulted/folded, moderately faulted/folded, intensely faulted/folded).
B) Parameter B, Geometry: Effect of discontinuity pattern with respect to the direction of the tunnel drive on the basis of:
a. Joint spacing.
b. Joint orientation (strike and dip).
c. Direction of tunnel drive.
C)Parameter C: Effect of groundwater inflow and joint condition on the basis of:
a. Overall rock mass quality on the basis of A and B combined.
b. Joint condition (good, fair, poor).
c. Amount of water inflow (in gallons per minute per 1000 feet of tunnel).
Figure 4: RSR support estimates for a 24 ft. (7.3 m) diameter circular tunnel. Note that rock bolts and shotcrete are generally used together. (After Wickham et al 1972).
Geo mechanics Classification:
Bieniawski (1976) published the details of a rock mass classification called the Geo mechanics Classification or the Rock Mass Rating (RMR) system. This system is used in wide engineering practise involving tunnels, chambers, mines, slopes, and foundations.The Geo mechanics Classification has found wide applications in various types of engineering projects such as;
Tunnels
Slopes
Foundations
Mines
The following six parameters are used to classify a rock mass using the RMR system:
1. Uni axial compressive strength of rock material.
2. Rock Quality Designation (RQD).
3. Spacing of discontinuities.
4. Condition of discontinuities.
5. Groundwater conditions.
6. Orientation of discontinuities.
In applying this classification system, the rock mass is divided into a number of structural regions and each region is classified separately. The boundaries of the structural regions usually coincide with a major structural feature such as a fault or with a change in rock type. In some cases, significant changes in discontinuity spacing or characteristics, within the same rock type, may necessitate the division of the rock mass into a number of small structural regions.
CLASSIFICATION PARAMETERS AND THEIR RATINGS
ROCK MASS CLASSES DETERMINED FROM TOTAL RATINGS:
Guidelines for excavation and support of 10 m span rock tunnels in accordance
with the RMR system (After Bieniawski 1989):
Subscribe to:
Posts (Atom)